|
|
| (15 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) |
| Zeile 1: |
Zeile 1: |
| − | [[Bild:S4-Herz.png|170px|thumb|right|S4 mit Herzstückpolisierung]] | + | [[Datei:S1_2105neu.png|150px|link=Servotiny#S1_Bedienung_durch_Schalter_.28A.2FB.29]] [[Datei:S2_2105neu.png|150px|link=Servotiny#S2_Bedienung_durch_einen_Taster_.28toggeln.29]] [[Datei:S3_2105neu.png|150px|link=Servotiny#S3_Bedienung_durch_einen_Taster_.28zeitgesteuert.29]] |
| − | [[Bild:S4-Car.png|180px|thumb|left|S4-Car mit Rückmelder]] | + | [[Datei:S4_2015neu.png|150px|link=Servotiny#S4_Bedienung_durch_zwei_Taster_.28A.2FB.29]]<br> |
| − | '''4-fach Servodecoder S4DCC/MOT'''
| + | S1 = [[Servotiny1]] |
| − | =Allgemeines= | + | S2 = [[Servotiny2]] |
| − | An diesen Decoder können bis zu 4 Servos angeschlossen werden. Es gibt verschiedene Varianten.<br>
| + | S3 = [[Servotiny3]] |
| − | Das besondere an diesem Servo-Decoder ist, dass nach dem Einschalten die Servos still stehen bleiben (kein Hin- und Herzucken). <br>
| + | S4 = [[Servotiny4]]<br> |
| − | Der Strom wird für die Servos erst beim Betätigen einer Taste eingeschaltet.<br>
| + | <hr> |
| − | Damit werden die mit dem Servo verbundenen mechanischen Elemente wie Weichen, Tore, Figuren usw. vor einer Überbeanspruchung oder gar Zerstörung geschützt.<br>
| + | {| |
| − | <br>
| + | |
| − | '''Generelle Eigenschaften des Decoders:'''<br>
| + | |
| − | DCC Protokoll (Adressen 1-2000)<br>
| + | |
| − | Der Decoder verwendet vier zusammenhängende Adressen.<br>
| + | |
| − | * Die Decoder-Adresse kann automatisch eingelernt werden.<br>
| + | |
| − | Eine Drehung von 180 Grad wird in ca. 15000 Schritten ausgeführt.<br>
| + | |
| − | * Die Drehrichtung jedes Servos kann umgekehrt werden.<br>
| + | |
| − | Drehgeschwindigkeit von 0,1 - 282 Sekunden<br>
| + | |
| − | Drehgeschwindigkeit für links und recht getrennt einstellbar.<br>
| + | |
| − | Ruckfreies Drehen auch bei langsamster Geschwindigkeit (gutes Servo vorausgesetzt)<br>
| + | |
| − | Stromversorgung aus der Digitalspannung möglich (nicht empfohlen wegen Wärmeentwicklung)<br>
| + | |
| − | Empfohlene Stromversorgung über eigenen Wechselspannungs-Trafo 12-16 Volt, 1 Ampere<br>
| + | |
| − | (Steckernetzteil usw.. Es kann auch 12 Volt Gleichstrom verwendet werden)<br>
| + | |
| − | Jedes der 4 Servos kann auf eine der Funktionen programmiert werden. <br>
| + | |
| − | * Die letzte Position des Servos wird im EEPROM bei jedem Positionswechsel abgespeichert.
| + | |
| − | * Die Spannung für jedes Servo ist abschaltbar, wenn es seine Endposition erreicht hat.
| + | |
| − | * Die Einstellung für jedes der vier Servos kann auf die Grundstellung zurückgesetzt werden.
| + | |
| − | * Die Einstelldaten können von einem auf ein anderes Servo kopiert werden.
| + | |
| − | * Die Einstelldaten aller Servos können auf dem PC gesichert werden und damit auch auf einen anderen Decoder kopiert werden.<br>
| + | |
| − | <br>
| + | |
| − | Einstellung der Parameter durch ein Windows-Programm über die serielle Schnittstelle (1-8).<br>
| + | |
| − | Alle Parameter können sofort ausprobiert werden. <br>
| + | |
| − | Die Digitalzentrale muß während der Einstellung abgeschaltet werden.<br>
| + | |
| − | Während des Betriebs wird die Verbindung zur serielle Schnittstelle nicht benötigt.<br>
| + | |
| − | <br>
| + | |
| − | Folgende Werte können über das Programm eingestellt und verändert werden:<br>
| + | |
| − | <br>
| + | |
| − | * DCC- oder Motorola-Adresse, wenn diese nicht auf Tastendruck eingelernt wird
| + | |
| − | * Servo-Fabrikat <br>
| + | |
| − | * Was soll das Servo steuern<br>
| + | |
| − | * Servo-Spannung abschalten nachdem das Servo seine Position erreicht hat<br>
| + | |
| − | * Servo-Pulsform positiv/negativ <br>
| + | |
| − | * Nachfedern bei Fügelsignal oder Bahnschranke<br>
| + | |
| − | * Nachfedern auf der linken/rechten Endposition <br>
| + | |
| − | * Stärke des Nachfederns<br>
| + | |
| − | * Linke Endposition <br>
| + | |
| − | * Rechte Endposition <br>
| + | |
| − | * Geschwindigkeit mit der das Servo nach links dreht<br>
| + | |
| − | * Geschwindigkeit mit der das Servo nach rechts dreht <br>
| + | |
| − | * Anzahl der Wiederholungen bei Dauerlauf<br>
| + | |
| − | * Die Geschwindigkeit für die links/rechts Drehung kann seperat eingestellt werden. Beim Bahnübergang sieht es z.B. gut aus, wenn die Schranke schneller zu- als auf geht. Die linke/rechte Endposition der Servos kann sehr fein eingestellt werden, da für eine 180 Grad Drehung ca. 15000 Schritte vorhanden sind. <br>
| + | |
| − | <br>
| + | |
| − | Die Weichen-Funktion: <br>
| + | |
| − | Eingestellt wird hierzu: <br>
| + | |
| − | <br>
| + | |
| − | * Die linke Position des Servos <br>
| + | |
| − | * Die rechte Position des Servos <br>
| + | |
| − | * Die Zeit, die das Servo braucht um die Weiche umzuschalten. <br>
| + | |
| − | Nachfedern wird hier nicht benötigt <br>
| + | |
| − | Die Flügelsignal-Funktion: <br>
| + | |
| − | Es kann in beiden Stellungen des Signalflügels ein Nachfedern des Flügels eingestellt werden. <br>
| + | |
| − | Dieses Video zeigt das Nachfedern des Flügels. <br>
| + | |
| − | Eingestellt wird hierzu: <br>
| + | |
| − | <br>
| + | |
| − | * Die linke Position des Servos (z.B. Flügel oben) <br>
| + | |
| − | * Die rechte Position des Servos (z.B. Flügel unten) <br>
| + | |
| − | * Die Geschwindigkeit, um den Flügel auf Fahrt zu stellen. <br>
| + | |
| − | * Die Geschwindigkeit, um den Flügel auf Halt zu stellen. <br>
| + | |
| − | * Die Stärke des Nachfederns. <br>
| + | |
| − | * Die Bahnschranken-Funktion: <br>
| + | |
| − | Es kann in beiden Stellungen der Bahnschranke ein Nachfedern der Schranke eingestellt werden. <br>
| + | |
| − | Eingestellt wird hierzu: <br>
| + | |
| − | * Die linke Position des Servos (z.B. Schranke oben) <br>
| + | |
| − | * Die rechte Position des Servos (z.B. Schranke unten) <br>
| + | |
| − | * Die Geschwindigkeit, um die Schranke zu heben. <br>
| + | |
| − | * Die Geschwindigkeit, um die Schranke zu senken. <br>
| + | |
| − | * Die Stärke des Nachfederns. <br>
| + | |
| − | Türen öffnen/schließen: <br>
| + | |
| − | <br>
| + | |
| − | Die Wiederholungs-Funktion:<br>
| + | |
| − | Das Servo dreht in der eingestellten Geschwindigkeit immer hin und her.<br>
| + | |
| − | Eingestellt wird hierzu:<br>
| + | |
| − | * Die linke Position des Servos<br>
| + | |
| − | * Die rechte Position des Servos<br>
| + | |
| − | * Die beiden Geschwindigkeiten mit der das Servo hin und her schwenkt.<br>
| + | |
| − | * Die Wiederholungsrate<br>
| + | |
| − | <br>
| + | |
| − | Der Servodecoder kann bedient werden durch:<br>
| + | |
| − | * [[Digitalzentrale]] (DCC oder Motorola)<br>
| + | |
| − | * über den seriellen Eingang durch einen [[USB-Adapter]] mit der [[Software]] [[Windigipet]]
| + | |
| − | * mit beiliegendem Testprogramm
| + | |
| − | * durch einen ansteckbaren [[Schaltervorsatz]]
| + | |
| | | | |
| − | =Ausführungen=
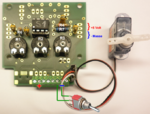
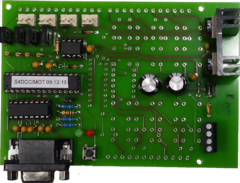
| + | |[[Datei:S4_Servo_Anschluss.png|240px|S4 Standartdecoder|link=S4-Decoder]] <br> |
| − | ==S4DCC/MOT==
| + | S4 = [[S4-Decoder]] S4ohneF<br> |
| − | <table>
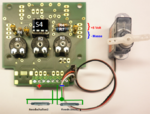
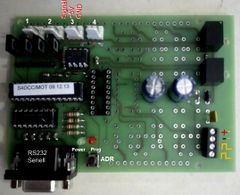
| + | [[Datei:S4N_Servo_Anschluss.jpg|240px|S4 Standartdecoder|link=S4N-Decoder]]<br> |
| − | <tr><td>
| + | S4 = [[S4N-Decoder]] S4NohneF<br> |
| − | [[Datei:S4_Servo_Anschluss.png|center|thumb|right|250px|S4 Standartdecoder|link=http://www.modellautobahnen.de/pdf/s4-2-DE.pdf]] | + | |
| − | </td><td>
| + | |
| − | 4-fach Servodecoder Standard <br>
| + | |
| − | Folgende Funktionen können mit diesem<br>
| + | |
| − | Decoder ausgeführt werden:<br>
| + | |
| − | * Servo - Eisenbahn - Weichen stellen
| + | |
| − | * Servo - '''[[Abzweigung]]en''' stellen
| + | |
| − | * Servo - '''[[Stopstelle]]n''' stellen
| + | |
| − | * Flügelsignale stellen
| + | |
| − | * Bahnschranken heben und senken
| + | |
| − | * Türen am BW öffnen/schließen
| + | |
| − | * Figuren bewegen
| + | |
| − | * ... und was sonst noch einfällt
| + | |
| − | * [http://www.digital-car.de/dc-car/dokumentation/anschluss/s4.pdf Anschlussplan des Servodecoder]
| + | |
| − | * [http://www.modellautobahnen.de/pdf/s4-2-DE.pdf Anschlussplan des Servodecoder deutsch]
| + | |
| − | * [http://www.modellautobahnen.de/pdf/s4-2-EN.pdf Anschlussplan des Servodecoder englisch]
| + | |
| − | * '''S4 [http://www.reichelt.de/?ACTION=20;AWKID=605547;PROVID=2084 bei Reichelt.de]''' (Stand 4.1.17)
| + | |
| − | </td></tr> | + | |
| − | </table>
| + | |
| | | | |
| − | ==S4DCC/MOT-Car==
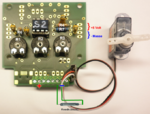
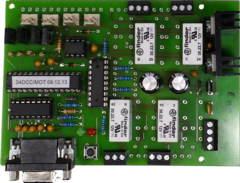
| + | ||[[Datei:S4-Car.png|240px|S4-Car mit Rückmelder|link=S4-Decoder#S4DCC.2FMOT-Car]] <br> |
| − | <table>
| + | S4-Car = [[S4Car]] S4RelaisF Rückmeldung<br> |
| − | <tr><td>
| + | [[Datei:S4N_Servo_Anschluss.jpg|240px|S4 Standartdecoder|link=S4-Decoder]]<br> |
| − | [[Bild:S4-Car.png|center|thumb|right|250px|S4-Car mit Rückmelderelais]] | + | S4-Car = [[S4NCar]] S4RelaisF Rückmeldung<br> |
| − | </td><td> | + | |
| − | 4-fach Servodecoder Car mit 4 Relais<br>
| + | |
| − | Folgende Funktionen können mit diesem<br>
| + | |
| − | Decoder ausgeführt werden:<br> | + | |
| − | * Servo - Eisenbahn - Weichen stellen
| + | |
| − | * Servo - '''[[Abzweigung]]en''' stellen
| + | |
| − | * Servo - '''[[Stopstelle]]n''' stellen
| + | |
| − | * Flügelsignale stellen
| + | |
| − | * Bahnschranken heben und senken
| + | |
| − | * Türen am BW öffnen/schließen
| + | |
| − | * Figuren bewegen
| + | |
| − | * Rückmeldung für DC-Car-Funktionsbaustein
| + | |
| − | * ... und was sonst noch einfällt
| + | |
| − | * [http://www.digital-car.de/dc-car/dokumentation/anschluss/s4_car.pdf Anschlussplan des Servodecoder]
| + | |
| − | * [https://www.reichelt.de/my/1296946 Reichelt-Warenkorb für S4Car mit 4 Relais]
| + | |
| − | </td></tr> | + | |
| − | </table>
| + | |
| | | | |
| − | ==S4DCC/MOT-Herz==
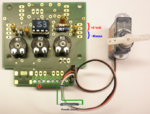
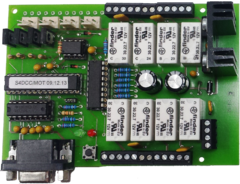
| + | ||[[Datei:S4-Herz.png|240px|S4-Car mit Rückmelder|link=S4-Decoder#S4DCC.2FMOT-Herz]] <br> |
| − | <table>
| + | S4-Herz = [[S4Herz]] S4Umpolrelaisf<br> |
| − | <tr><td>
| + | [[Datei:S4N_Servo_Anschluss.jpg|240px|S4 Standartdecoder|link=S4-Decoder]]<br> |
| − | [[Bild:S4-Herz-Ans.png|center|thumb|right|250px|S4-Herz mit Herzstückpolarisierung]] | + | S4-Herz = [[S4NHerz]] S4NUmpolrelaisf<br> |
| − | </td><td>4-fach Servodecoder Herz mit 8 Relais <br>
| + | |--- |
| − | Folgende Funktionen können mit diesem<br>
| + | |} |
| − | Decoder ausgeführt werden:<br> | + | |
| − | * Servo - Eisenbahn - Weichen stellen
| + | |
| − | Dieser Decoder schaltet das Herzstück der <br>
| + | |
| − | Weiche vor dem Umschalten ab.<br>
| + | |
| − | * Servo - '''[[Abzweigung]]en''' stellen
| + | |
| − | * Servo - '''[[Stopstelle]]n''' stellen
| + | |
| − | * Flügelsignale stellen
| + | |
| − | * Bahnschranken heben und senken
| + | |
| − | * Türen am BW öffnen/schließen
| + | |
| − | * Figuren bewegen
| + | |
| − | * mit Herzstückpolarisierung
| + | |
| − | * ... und was sonst noch einfällt
| + | |
| − | * [http://www.digital-car.de/dc-car/dokumentation/anschluss/s4_herz.pdf Anschlussplan des Servodecoder]<br>
| + | |
| − | * [https://www.reichelt.de/my/1296945 Reichelt-Warenkorb für S4Herz mit 8 Relais und 4 zusätzlichen Sicherungen]
| + | |
| − | </td></tr>
| + | |
| − | </table>
| + | |
| − | | + | |
| − | =Einstellen= | + | |
| − | Alle Servodecoder und Ampeldecoder von DC-Car werden mit dem '''[[Programmer]]''' über den PC eingestellt.<br>
| + | |
| − | Für Motorola (Märklin) muss der Decoder umgestellt werden (Lötbrücke) und
| + | |
| − | der Digitalanschluss polrichtig angeschlossen werden.
| + | |
| − | Märklin (braun und rot).
| + | |
| − | Ein Verpolung führt zu keinem Schaden, aber auch zu keiner Funktion.
| + | |
| − | | + | |
| − | =Bauanleitung=
| + | |
| − | '''[[S4DCC-Bauanleitung]]''' oder als PDF [http://www.modellautobahnen.de/download/S4_Servodecoder/Servodecoder_S4ce.pdf Download Bauanleitung]<br>
| + | |
| − | =Handbuch= | + | |
| − | Handbuch für den S4-Servodecoder als PDF [http://www.modellautobahnen.de/download/s4_Servodecoder/Handbuch_4-fach_Servo_DCC-MOT-Decoder.pdf Download]
| + | |
| − | | + | |
| − | =[[Servotiny#S1-S4|Servotiny - Alternative für ein Servo]]=
| + | |
| − | Alternative für einen Servodecoder: Ein [[Servotiny]] z.B. S4<br>
| + | |
| − | | + | |
| − | [[Kategorie:Servo]] [[Kategorie:Car-System]] [[Kategorie:DC-Car-System]]
| + | |
| − | [[Kategorie:Funktionsbaustein_Funktionsdecoder]][[Kategorie:Servodecoder]][[Kategorie:Servosteuerung]]
| + | |
| − | [[Kategorie:Fehler]]
| + | |
| − | [[Kategorie:Handbuecher]]
| + | |